Simple Pendulum
A simple pendulum is defined as an object that has a small mass (pendulum bob), which is suspended from a wire or string having negligible mass.
- Whenthe pendulum bob is displaced it oscillates on a plane about the vertical line through the support.
- Simple pendulum can be set into oscillatory motion by pulling it to one side of equilibrium position and then releasing it.
Problem:-A cylindrical piece of cork of density of base area A and height h floats in a liquid ofdensity ρl. The cork is depressed slightly and then released. Show that the corkoscillates up and down simple harmonically with a period
T = 2 π√hρ/ρlg
where ρ is the density of cork. (Ignore damping due to viscosity of the liquid)
Answer:-
Base area of the cork = A
Height of the cork = h
Density of the liquid = ρ1
Density of the cork = ρ
In equilibrium:
Weight of the cork = Weight of the liquid displaced by the floating cork
Let the cork be depressed slightly by x. As a result, some extra water of a certain volume is displaced. Hence, an extra up-thrust acts upward and provides the restoring force to the cork.
Up-thrust = Restoring force, F = Weight of the extra water displaced
F = –(Volume × Density × g)
Volume = Area × Distance through which the cork is depressed
Volume = Ax
∴ F = – A x ρ1 g …..(i)
According to the force law:
F = kx
k = F/x
where, k is constant
k = F/x = -Aρ1 g…. (ii)
The time period of the oscillations of the cork:
T = 2π√m/k …. (iii)
where,
m = Mass of the cork
= Volume of the cork × Density
= Base area of the cork × Height of the cork × Density of the cork
= Ahρ
Hence, the expression for the time period becomes:
T=2π√Ahρ/Ahρ1g
T = 2π√hρ/ρ1g
DAMPED SIMPLE HARMONIC MOTION
Damped SHM can be stated as:-
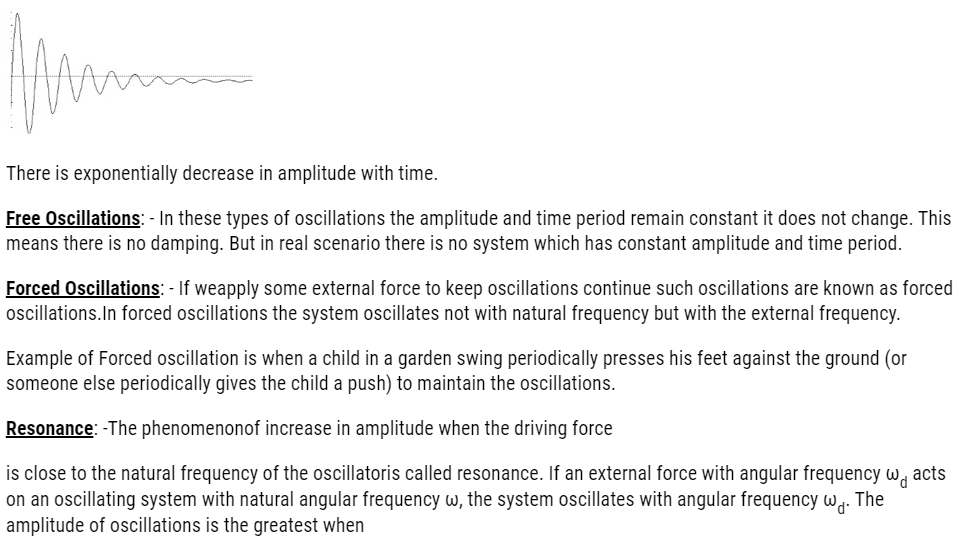
- Motion in which amplitude of the oscillating body reduces and eventually comes to its mean position.
- Dissipating forces cause damping.
- Consider a pendulum which is oscillating
- After some time we can observe that its displacement starts decreasing and finally it comes to rest.
- This implies that there is some resistive force which opposes the motion of the pendulum. This type of SHM is known as Damped SHM.
Damping Force:-
- It opposes the motion of thebody.
- Magnitude of damping force is proportional to the velocity of the body.
- It actsin the opposite direction of the velocity.
- Denoted by Fdwhere d is the damping force.
- Fd= -b v where b is a damping constant and it depends on characteristics of the medium (viscosity, for example) and the size and shape of the block.
- (-ive) directed opposite to velocity
Equation for Damped oscillations: Consider a pendulum which is oscillating.
It will experience two forces
- Restoring force Fs = -k x
- Damping Force Fd = -b v
The total force Ftotal = Fs + Fd = -k x – b v
Let a (t) = acceleration of the block
Ftotal= m a (t)
-k x – b v = md2x/dt2
md2x/dt2 + kx + bv =0
or md2x/dt2 + b dx/dt+ kx=0 (v=dx/dt) (differential equation)
d2x/dt2+ (b/m) dx/dt+ (k/m) x=0
After solving this equation
x(t) = A e–b t/2m cos (ω′t + φ ) (Equation of damped oscillations)
Damping is caused by the term e–b t/2m
ω’ =angular frequency
Mathematically can be given as:-
ω ′= −√ (k/m –b2/4m2)
Consider if b=0 (where b= damping force) then
x (t) = cos (ω′t + φ)( Equation of Simple Harmonic motion)
Graphically if we plot Damped Oscillations

In the above figure there are set of 5 pendulums of different lengths suspended from a common rope.
- The figure has 4 pendulums and the strings to which pendulum bobs 1 and 4 are attached are of the same length and the others are of different lengths.
- Once displaced, the energy from this pendulum gets transferred to other pendulums through the connecting rope and they start oscillating. The driving force is provided through the connecting rope and the frequency of this force is the same as that of pendulum 1.
- Once pendulum 1 is displaced, pendulums 2, 3 and 5 initially start oscillating with their natural frequenciesand different amplitudes, but this motion is gradually damped and not sustained.
- Their oscillation frequencies slowly change and later start oscillating with thefrequency of pendulum 1, i.e. the frequency ofdriving force but with different amplitudes.
- They oscillate with small amplitudes. The oscillation frequency of pendulum 4 is different than pendulums 2, 3 and 5.
- Pendulum 4 oscillates with the same frequency as that of pendulum 1 and its amplitude gradually picks up and becomes very large.
- This happens due to the condition for resonance getting satisfied, i.e. the natural frequency of the system coincides with that of the driving force